STM32マイコン35(HAL_I2C関数について)
1.本日の内容
(1) HAL_I2Cに関連する関数の使い方について理解する。
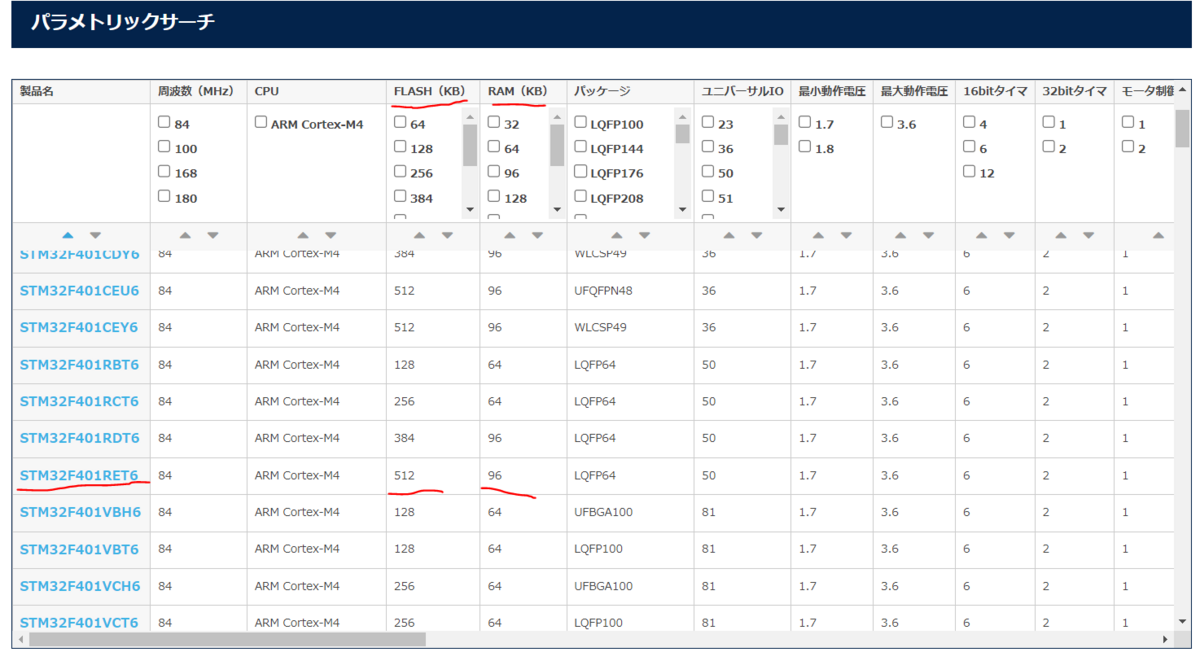
使用マイコン:
・目次
- STM32マイコン35(HAL_I2C関数について)
- 1.本日の内容
- 2.内容
- (1) HAL_I2C_Master_Transmit関数とは
- (2) HAL_I2C_Master_Transmit関数の使い方
- (3) HAL_I2C_Master_Reveive関数とは
- (4) HAL_I2C_Master_Reveive関数の使い方
- (5) HAL_I2C_Master_Transmit_IT関数とは
- (6) HAL_I2C_Master_Transmit_IT関数の使い方
- (7) HAL_I2C_Master_Reveive_IT関数とは
- (8) HAL_I2C_Master_Reveive_IT関数の使い方
- (9) HAL_I2C_Master_Seq_Transmit_IT関数とは
- (10) HAL_I2C_Master_Seq_Transmit_IT関数の使い方
- (11) HAL_I2C_Master_Seq_Reveive_IT関数とは
- (12) HAL_I2C_Master_Seq_Reveive_IT関数の使い方
- (13) HAL_I2C_Mem_Write関数とは
- (14) HAL_I2C_Mem_Write関数の使い方
- (15) HAL_I2C_Mem_Read関数とは
- (16) HAL_I2C_Mem_Read関数の使い方
- (17) CubeMXの設定
- 3.関連記事
2.内容
(1) HAL_I2C_Master_Transmit関数とは
・通常のI2C通信のデータを送信する為の関数。
・STM32マイコン向けに提供されるHALライブラリで用意されている。
(2) HAL_I2C_Master_Transmit関数の使い方
HAL_I2C_Master_Transmit(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
uint8_t data_to_send[2] = {0x12, 0x34}; // 送信するデータ HAL_I2C_Master_Transmit(&hi2c1,slaveAddress<<1,data_to_send,2,HAL_MAX_DELAY);
※slaveAddressは、通常7ビットで、R/W指定をするために、
スレーブアドレスを1ビット左にずらし、0を入れる。
参考:STM32マイコン25(LCD:ACM1602のI2C制御方法) - Project_OKI’s diary

※詳細は、ユーザーマニュアルを参照
→UM1725 | STM32, STM8ファミリはSTの32bit/8bit汎用マイクロコントローラ製品
(3) HAL_I2C_Master_Reveive関数とは
(4) HAL_I2C_Master_Reveive関数の使い方
HAL_I2C_Master_Receive(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
uint8_t received_data[2]; // 受信したデータを格納するバッファ HAL_I2C_Master_Receive(&hi2c1,(slaveAddress<<1)|1,received_data,2, HAL_MAX_DELAY);
※slaveAddressは、通常7ビットで、R/W指定をするために、
スレーブアドレスを1ビット左にずらし、1を入れる。
(8ビットの場合は、いらない)
(5) HAL_I2C_Master_Transmit_IT関数とは
(6) HAL_I2C_Master_Transmit_IT関数の使い方
HAL_I2C_Master_Receive_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size);
uint8_t sendData[2]; // 送信するデータのバッファ sendData[0] = 0xAA; sendData[1] = 0xBB; HAL_I2C_Master_Transmit_IT(&hi2c1, slaveAddress<<1,sendData,sizeof(sendData));
(7) HAL_I2C_Master_Reveive_IT関数とは
・STM32マイコン向けに提供されるHALライブラリで用意されている。
(8) HAL_I2C_Master_Reveive_IT関数の使い方
HAL_I2C_Master_Receive_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size);
使用例:
uint8_t receiveData[2]; // 受信データを格納するバッファ HAL_I2C_Master_Receive_IT(&hi2c1, (slaveAddress<<1)|1, receiveData, sizeof(receiveData));
(9) HAL_I2C_Master_Seq_Transmit_IT関数とは
・STM32マイコン向けに提供されるHALライブラリで用意されている。
(10) HAL_I2C_Master_Seq_Transmit_IT関数の使い方
HAL_I2C_Master_Seq_Transmit_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint32_t Request, uint8_t *pData, uint16_t Size);
uint8_t sendData[2]; // 送信するデータのバッファ sendData[0] = 0xAA; sendData[1] = 0xBB; HAL_I2C_Master_Seq_Transmit_IT(&hi2c1, slaveAddress<<1,I2C_FIRST_FRAME, sendData, sizeof(sendData));
(11) HAL_I2C_Master_Seq_Reveive_IT関数とは
・STM32マイコン向けに提供されるHALライブラリで用意されている。
(12) HAL_I2C_Master_Seq_Reveive_IT関数の使い方
HAL_I2C_Master_Seq_Receive_IT(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint32_t Request, uint8_t *pData, uint16_t Size);
使用例:
uint8_t receiveData[2]; // 受信データを格納するバッファ HAL_I2C_Master_Seq_Receive_IT(&hi2c1,(slaveAddress<<1)|1, I2C_FIRST_FRAME, receiveData, sizeof(receiveData));
(13) HAL_I2C_Mem_Write関数とは
・STM32マイコン向けに提供されるHALライブラリで用意されている。
・指定されたメモリアドレスに対してデータを書き込むための非同期関数。
・I2C通信を使用して特定のメモリアドレスにデータを書き込むために使用する。
(14) HAL_I2C_Mem_Write関数の使い方
HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout);
使用例:
uint8_t sendData[2]; // 書き込むデータを格納するバッファ sendData[0] = 0xAA; sendData[1] = 0xBB; HAL_I2C_Mem_Write(&hi2c1, slaveAddress<<1, memAddress, I2C_MEMADD_SIZE_8BIT, sendData, sizeof(sendData), HAL_MAX_DELAY);
この例では、
・I2Cハンドル hi2c1 を使用
・slaveAddress のスレーブデバイスに通信
・memAddress で指定されたメモリアドレスに
・sendData バッファ内のデータを書き込み。
これは例えば、温度センサ(MLX90614ESF-DCH)など、メモリアドレスを指定して使用するI2Cデバイスを使用する際に、この関数を使用する。
(15) HAL_I2C_Mem_Read関数とは
・STM32マイコン向けに提供されるHALライブラリで用意されている。
・指定されたメモリアドレスのデータを読み取るための非同期関数。
・I2C通信を使用して特定のメモリアドレスのデータを読み込むために使用する。
(16) HAL_I2C_Mem_Read関数の使い方
HAL_I2C_Mem_Read(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout);
使用例:
uint8_t receiveData[2]; // 読み取ったデータを格納するバッファ HAL_I2C_Mem_Read(&hi2c1, (slaveAddress<<1)|1, memAddress, I2C_MEMADD_SIZE_8BIT, receiveData, sizeof(receiveData), HAL_MAX_DELAY);
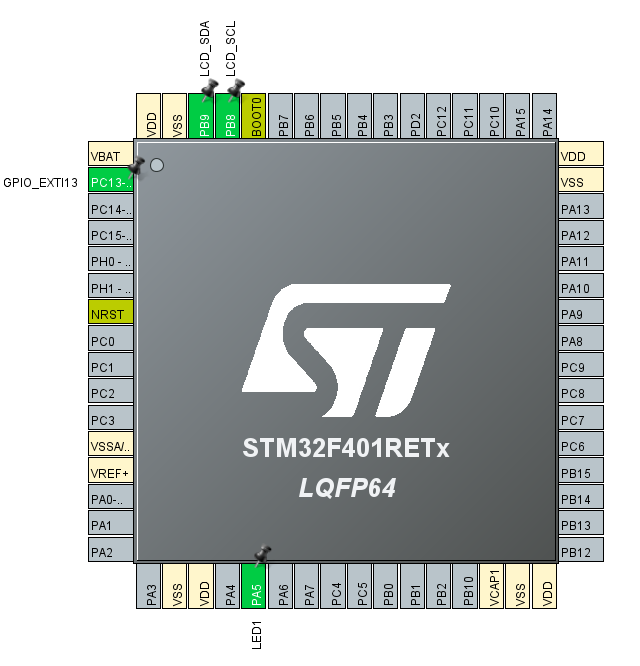
(17) CubeMXの設定
・File→New ProjectでSTM32F401を選択し、新しいプロジェクトを作成する。
| Mater Feature | |
|---|---|
| I2C Speed Mode | Standard Mode |
| I2C Clock Speed | 100000 |
| Slave Features | |
| Clock No Stretch Mode | Disable |
| Primary Address Length selection | 7-bit |
| Dual Address Acknowledged | Disable |
| Primary slave address | 0 |
| Generala Call address detection | Disabled |
下記に簡単に、それぞれの設定の意味を示す。
| 設定項目 | 説明 |
|---|---|
| Master Features | I2C通信のマスター側の設定項目 |
| I2C Speed Mode |
I2Cのスピードモード設定。 標準モード、Fastモードが選択可能 ※今回はそこまで速度が必要ないので標準。 |
| I2C Clock Speed |
I2Cのクロック速度設定。Hz単位で設定可能 ※データシートより100kHzに設定 |
| Slave Features | I2C通信のスレーブ側の設定項目 |
| Clock No Stretch Mode | スレーブデバイスによるクロックのストレッチを禁止するか選択。 |
| Primary Address Length selection |
プライマリアドレスのビット数を7ビット または10ビットで設定可能。 |
| Dual Address Acknowledged | スレーブデバイスが2つのアドレスを認識するかどうか選択可能。 |
| Primary slave address | スレーブデバイスのプライマリアドレスを設定可能。 |
| General Call address detection | ジェネラルコールアドレスの受信を有効にするか選択可能。 |
※仕様上、LCDのI2Cクロックスピードは100kHzまで可能。
線の長さなどによっては、そのスピードだと通信できない可能性がある。
その場合は、70kHzなどクロックスピードを落とすと通信出来るようになる。

(c)NVICを設定 (割り込みを使用する場合)
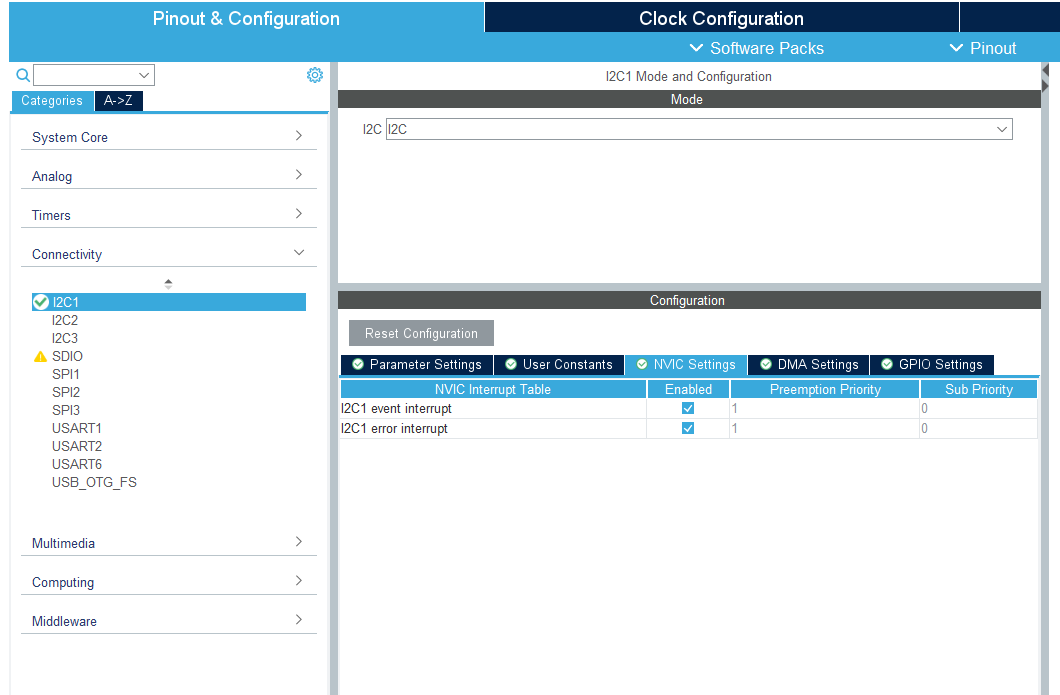
(d) 割り込みの優先順位を下げる。

(e) プロジェクト名を付け、Toolchain/IEDをTrueSTUDIOに設定
3.関連記事
・STM32マイコン_2(UART通信:TeraTermにHellow表示) - Project_OKI’s diary
・STM32マイコン_3(UART通信:複数文字送信) - Project_OKI’s diary
・STM32マイコン_4(NVICの設定内容) - Project_OKI’s diary
・STM32マイコン_5(スイッチ入力とLED点灯、消灯) - Project_OKI’s diary
C言語:
・組み込みの為のC言語基礎知識1(printf) - Project_OKI’s diary
・C言語基礎知識2(for分で処理を繰り返す) - Project_OKI’s diary
・C言語基礎知識3(配列) - Project_OKI’s diary
![[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]](https://hbb.afl.rakuten.co.jp/hgb/14d6092c.56ff1681.14d6092d.205a5b2c/?me_id=1213310&item_id=20793641&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Fbook%2Fcabinet%2F1869%2F9784297131869_1_2.jpg%3F_ex%3D240x240&s=240x240&t=picttext "[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]")